LZ-Opticks-NVIDIA OptiX 6->7 : Notes
Progress
- Foundry based CSG geometry model
- only ~4 GPU allocations for all Solids
- brought in the many more basis shapes
- including : ellipsoid, plane defined convexpolyhedron
- migrated CSG to this geometry model : intersect_tree.h intersect_node.h
- easily testable on CPU (tests/ScanTest.sh)
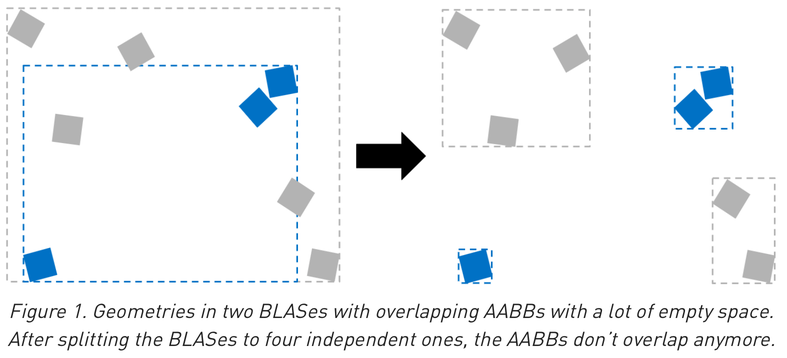
- Clustered Sphere Issue : split geometry in one GAS ?
NEXT STEPS:
- split off CSG package used by OptiXTest(OptiX 7)
- get OptiX 6 to work with new CSG geometry model -> less code to maintain (during transition)
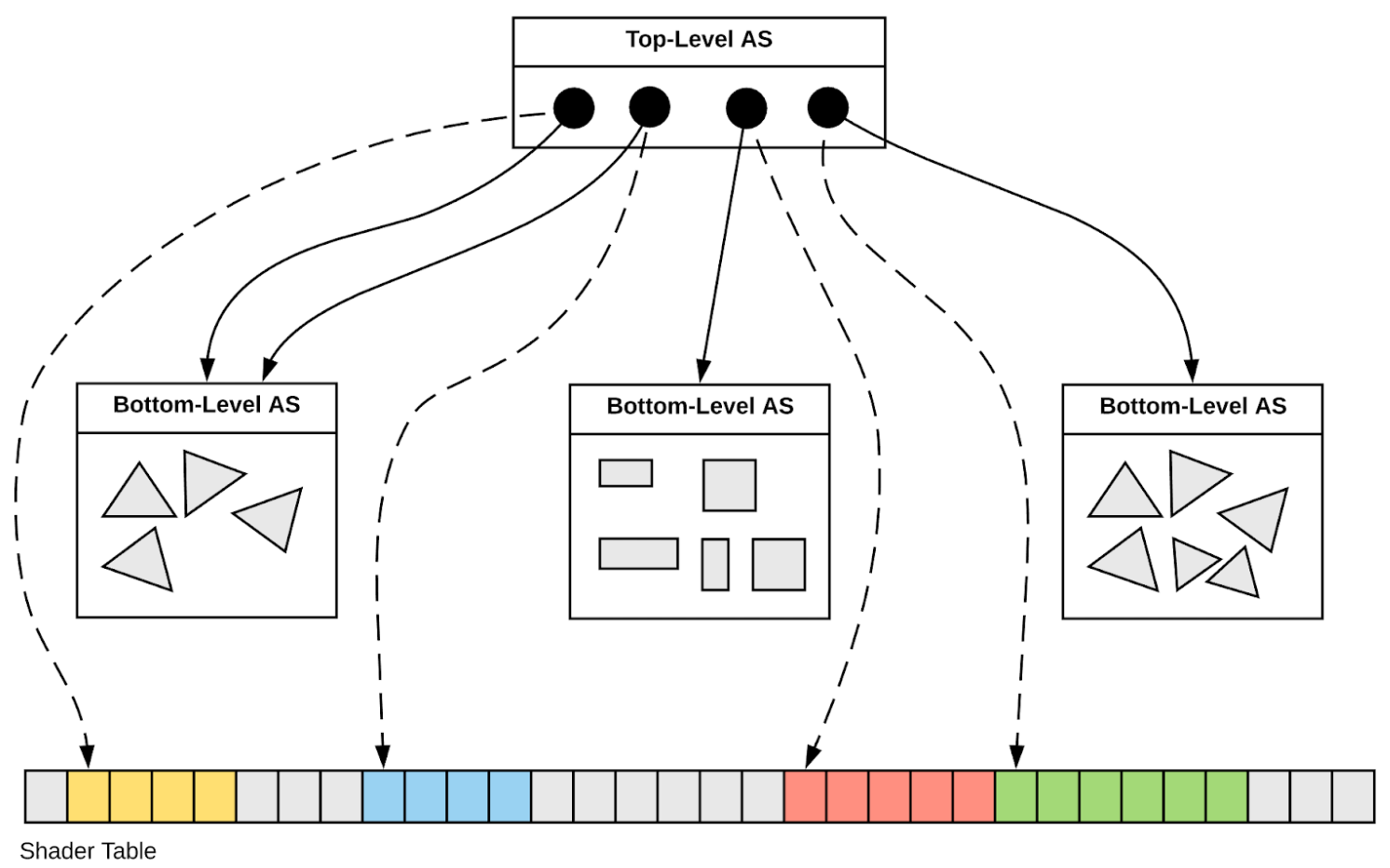
- Interface with Opticks : GMergedMesh -> Node,Prim,Plan,Tran -> SBT records
- performance tests with full geometries, try different approaches:
- For "global" non-repeated : one big remainder GAS ? Or split up into many GAS ?
- Reference all GAS (repeats and singles) from one IAS, or multi-IAS ?
Simon C Blyth, April 4, 2021
"Foundry" based CSG geometry model : Solid/Prim/Node
All solids+constituents created via Foundry (ref by index)
- Solid : 1 or more Prim : ( Solid -> GAS )
- Prim : 1 or more Node : (Prim ~ G4VSolid)
- (nodeOffset, numNode) -> SBT HitGroup record
- Node : CSG constituents
- basis shapes : sphere, box3, cone, cylinder, ...
- boolean operators : union, intersection, difference
- qat4 : scale-rotate-translate transform
- float4 : planes (normal + distance to origin)
Node Examples:
- Ellipsoid : sphere with scale transform
- ConvexPolyhedron_Tetrahedron : (planeIdx, numPlanes)
- Foundry::upload
all solids in geometry -> only four GPU allocations
- d_prim, d_node, d_plan, d_itra
https://github.com/simoncblyth/OptiXTest/blob/main/Foundry.h
https://github.com/simoncblyth/OptiXTest/blob/main/qat4.h
OptiX 7 Intersect Prim (numNode, nodeOffset) ~ HitGroupData
150 extern "C" __global__ void __intersection__is()
151 {
152 HitGroupData* hg = (HitGroupData*)optixGetSbtDataPointer();
153 int numNode = hg->numNode ;
154 int nodeOffset = hg->nodeOffset ;
155
156 const Node* node = params.node + nodeOffset ;
157 const float4* plan = params.plan ;
158 const qat4* itra = params.itra ;
159
160 const float t_min = optixGetRayTmin() ;
161 const float3 ray_origin = optixGetObjectRayOrigin();
162 const float3 ray_direction = optixGetObjectRayDirection();
163
164 float4 isect ;
165 if(intersect_prim(isect, numNode, node, plan, itra,
t_min , ray_origin, ray_direction ))
166 {
167 const unsigned hitKind = 0u ;
168 unsigned a0, a1, a2, a3;
169
170 a0 = float_as_uint( isect.x );
171 a1 = float_as_uint( isect.y );
172 a2 = float_as_uint( isect.z );
173 a3 = float_as_uint( isect.w ) ;
174
175 optixReportIntersection( isect.w, hitKind, a0, a1, a2, a3 );
176 }
177 }
- nodeOffset : points to first Node in tree of numNode
Prim : 1 or more Node : Holds AABB
| q |
x |
y |
z |
w |
|---|
| q0 |
numNode |
nodeOffset |
tranOffset |
planOffset |
| q1 |
sbtIndexOffset |
|
|
|
| q2 |
BBMin_x |
BBMin_y |
BBMin_z |
BBMax_x |
| q3 |
BBMax_y |
BBMax_z |
|
|
- Foundry::upload -> d_prim (array of Prim on device)
- Foundry::getPrimSpecDevice -> PrimSpec -> GAS
- avoids separate AABB allocations for all GAS
36 PrimSpec Prim::MakeSpec( const Prim* prim0,
unsigned primIdx,
unsigned numPrim ) // static
37 {
38 const Prim* prim = prim0 + primIdx ;
40 PrimSpec ps ;
41 ps.aabb = prim->AABB() ;
42 ps.sbtIndexOffset = prim->sbtIndexOffsetPtr() ;
43 ps.num_prim = numPrim ;
44 ps.stride_in_bytes = sizeof(Prim);
45 return ps ;
46 } // used on CPU to give device side pointers offset from d_prim
167 PrimSpec Foundry::getPrimSpecDevice(unsigned solidIdx) const
168 {
170 const Solid* so = solid.data() + solidIdx ;
171 return Prim::MakeSpec( d_prim, so->primOffset, so->numPrim ) ;;
174 }
intersect_prim -> intersect_node/intersect_tree
1089 INTERSECT_FUNC
1090 bool intersect_prim( float4& isect, int numNode, const Node* node, const float4* plan, const qat4* itra,
const float t_min , const float3& ray_origin, const float3& ray_direction )
1091 {
1092 return numNode == 1
1093 ?
1094 intersect_node(isect, node, plan, itra, t_min, ray_origin, ray_direction )
1095 :
1096 intersect_tree(isect, numNode, node, plan, itra, t_min, ray_origin, ray_direction )
1097 ;
1098 }
Intersection maths : intersect_node.h intersect_tree.h -> allows testing on CPU with tests/ScanTest.cc
https://github.com/simoncblyth/OptiXTest/blob/main/intersect_node.h
https://github.com/simoncblyth/OptiXTest/blob/main/intersect_tree.h
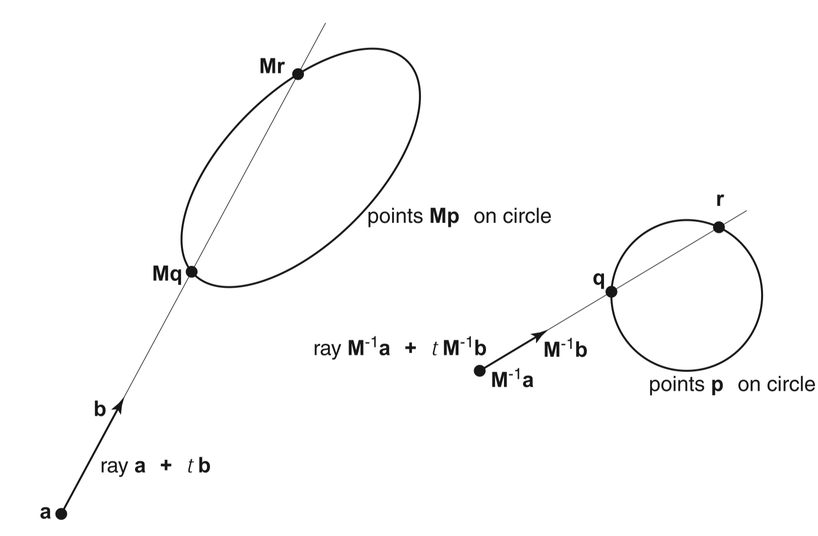
intersect_node : handling scale-rotate-translate transforms and complemented "inside-out" solids
1028 bool intersect_node( float4& isect, const Node* node, const float4* plan, const qat4* itra, const float t_min ,
const float3& ray_origin , const float3& ray_direction )
1029 {
1030 const unsigned typecode = node->typecode() ;
1031 const unsigned gtransformIdx = node->gtransformIdx() ;
1032 const bool complement = node->complement();
1034 const qat4* q = gtransformIdx > 0 ? itra + gtransformIdx - 1 : nullptr ; // gtransformIdx is 1-based, 0 meaning None
1036 float3 origin = q ? q->right_multiply(ray_origin, 1.f) : ray_origin ;
1037 float3 direction = q ? q->right_multiply(ray_direction, 0.f) : ray_direction ;
....
1055 bool valid = false ;
1056 switch(typecode)
1057 {
1058 case CSG_SPHERE: valid = intersect_node_sphere( isect, node->q0, t_min, origin, direction ) ; break ;
1059 case CSG_ZSPHERE: valid = intersect_node_zsphere( isect, node->q0, node->q1, t_min, origin, direction ) ; break ;
1060 case CSG_CONVEXP: valid = intersect_node_convexp( isect, node, plan, t_min, origin, direction ) ; break ;
1061 case CSG_CONE: valid = intersect_node_cone( isect, node->q0, t_min, origin, direction ) ; break ;
1062 case CSG_HYPERB: valid = intersect_node_hyperb( isect, node->q0, t_min, origin, direction ) ; break ;
1063 case CSG_BOX3: valid = intersect_node_box3( isect, node->q0, t_min, origin, direction ) ; break ;
1064 case CSG_PLANE: valid = intersect_node_plane( isect, node->q0, t_min, origin, direction ) ; break ;
1065 case CSG_SLAB: valid = intersect_node_slab( isect, node->q0, node->q1, t_min, origin, direction ) ; break ;
1066 case CSG_CYLINDER: valid = intersect_node_cylinder(isect, node->q0, node->q1, t_min, origin, direction ) ; break ;
1067 case CSG_DISC: valid = intersect_node_disc( isect, node->q0, node->q1, t_min, origin, direction ) ; break ;
1068 }
1069 if(valid && q ) q->left_multiply_inplace( isect, 0.f ) ;
// normals transform with inverse-transform-transposed -> left_multiply
1076 if(complement){ isect.x = -isect.x ; isect.y = -isect.y ; isect.z = -isect.z ; }
// flip complement normal, even for miss need to signal the complement with a -0.f
1082 return valid ;
1083 }
intersect_tree : Boolean CSG implementation : tranche slices of postorder sequence...
https://github.com/simoncblyth/OptiXTest/blob/main/intersect_tree.h
10 #include "error.h"
11 #include "tranche.h"
12 #include "csg.h"
13 #include "postorder.h"
14 #include "pack.h"
15 #include "csg_classify.h"
16
19 bool intersect_tree( float4& isect,
int numNode,
const Node* node,
const float4* plan0,
const qat4* itra0,
const float t_min ,
const float3& ray_origin,
const float3& ray_direction
)
20 {
21 unsigned height = TREE_HEIGHT(numNode) ; // 1->0, 3->1, 7->2, 15->3, 31->4
22 float propagate_epsilon = 0.0001f ; // ?
23 int ierr = 0 ;
24
25 LUT lut ;
26 Tranche tr ;
27 tr.curr = -1 ;
29 unsigned fullTree = PACK4(0,0, 1 << height, 0 ) ; // leftmost: 1<<height, root:1>>1 = 0 ("parent" of root)
30
35 tranche_push( tr, fullTree, t_min );
37 CSG_Stack csg ;
38 csg.curr = -1 ;
39 int tloop = -1 ;
40
41 while (tr.curr > -1)
42 {
..
CSG Parade Grid 1
CSG Parade Grid 2
CSG Working
CSG Boolean Parade Grid
Clustered Sphere Issue : Testing split shapes in single GAS
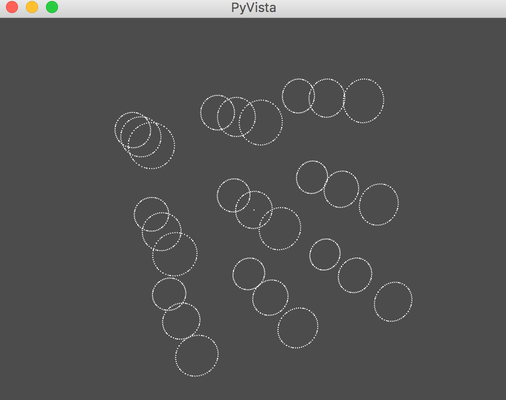
Expecting 9 spheres (CPU ScanTest "PyVista" view on right)
- see only one sphere ? Using 1 GAS with 1 BI with 9 AABB
- is there some "containment" requirement for the AABB in a GAS ?
G4Boolean -> CUDA/OptiX Intersection Program Implementing CSG
Complete Binary Tree, pick between pairs of nearest intersects:
| UNION tA < tB |
Enter B |
Exit B |
Miss B |
|---|
| Enter A |
ReturnA |
LoopA |
ReturnA |
| Exit A |
ReturnA |
ReturnB |
ReturnA |
| Miss A |
ReturnB |
ReturnB |
ReturnMiss |
- Nearest hit intersect algorithm [1] avoids state
- sometimes Loop : advance t_min , re-intersect both
- classification shows if inside/outside
- Evaluative [2] implementation emulates recursion:
- recursion not allowed in OptiX intersect programs
- bit twiddle traversal of complete binary tree
- stacks of postorder slices and intersects
- Identical geometry to Geant4
- solving the same polynomials
- near perfect intersection match
- [1] Ray Tracing CSG Objects Using Single Hit Intersections, Andrew Kensler (2006)
- with corrections by author of XRT Raytracer http://xrt.wikidot.com/doc:csg
- [2] https://bitbucket.org/simoncblyth/opticks/src/tip/optixrap/cu/csg_intersect_boolean.h
- Similar to binary expression tree evaluation using postorder traverse.
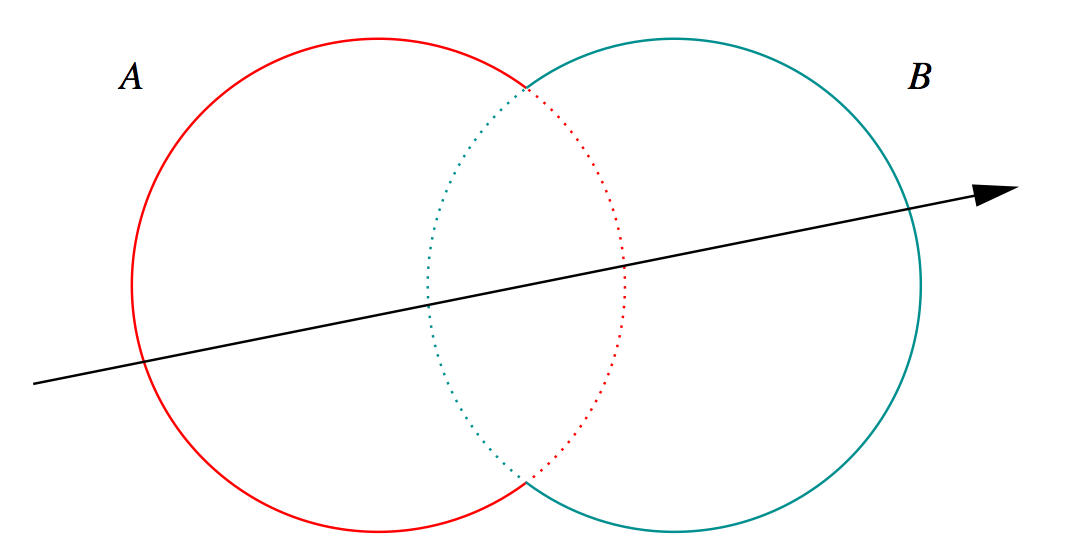
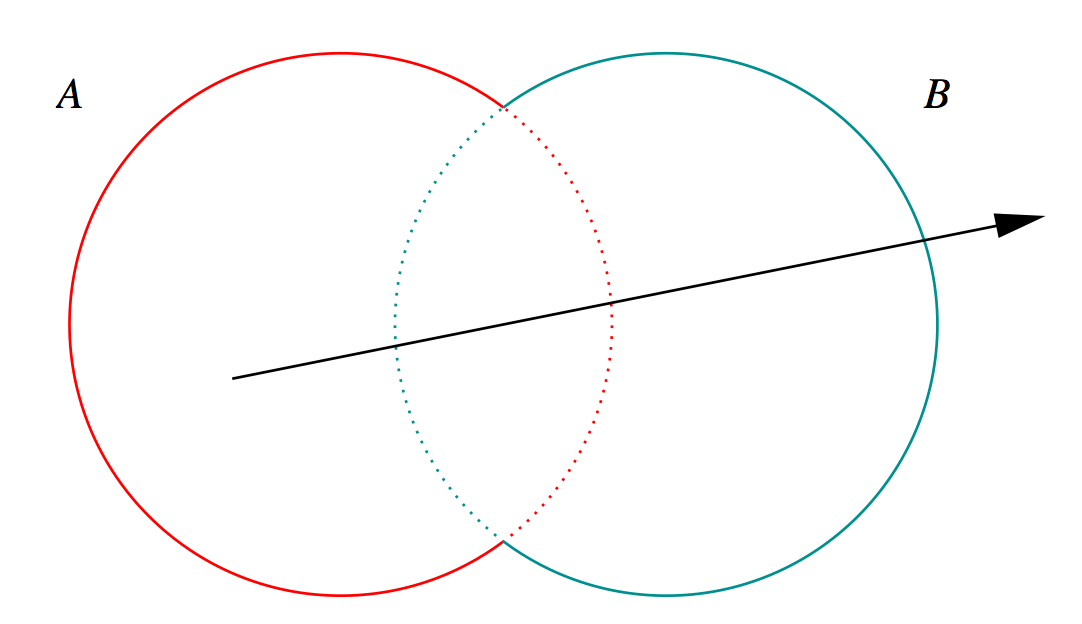
Constructive Solid Geometry (CSG) : Shapes defined "by construction"
Simple by construction definition, implicit geometry.
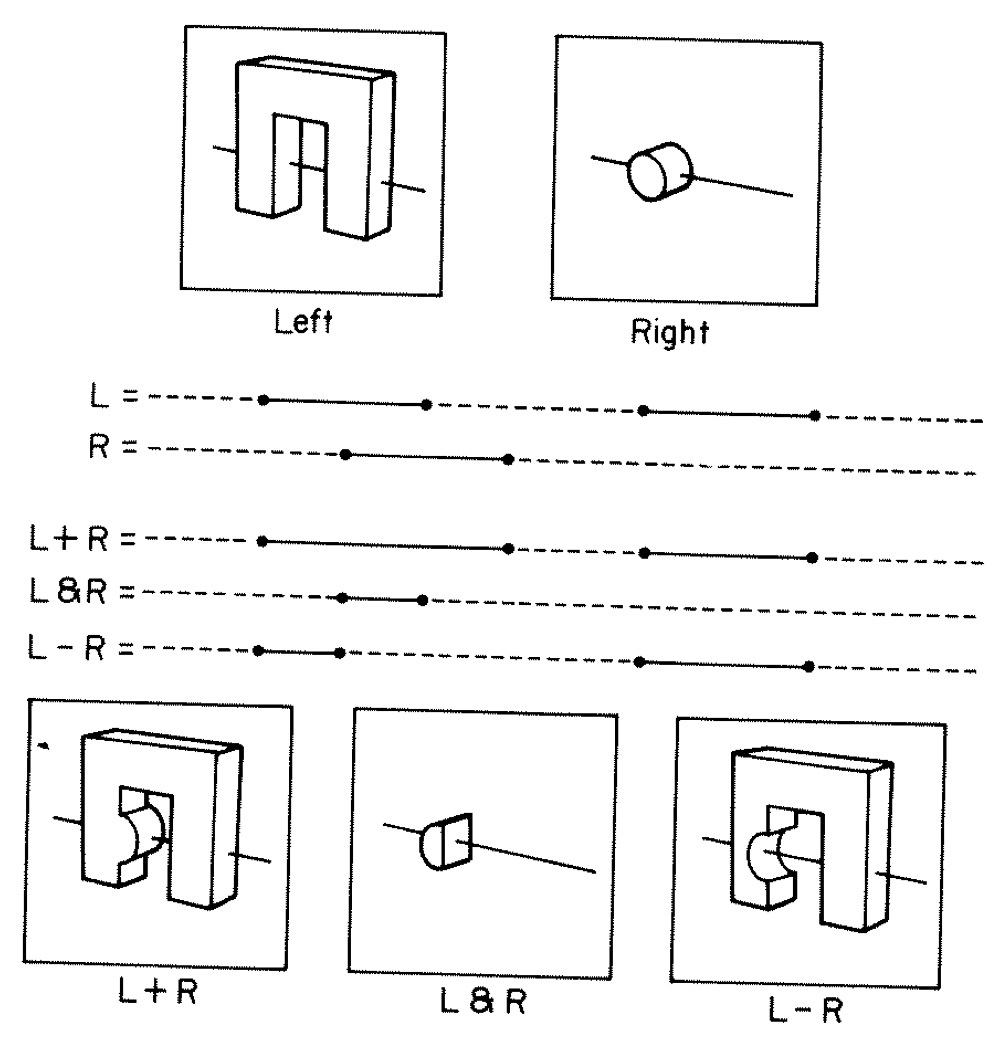
- A, B implicit primitive solids
- A + B : union (OR)
- A * B : intersection (AND)
- A - B : difference (AND NOT)
- !B : complement (NOT) (inside <-> outside)
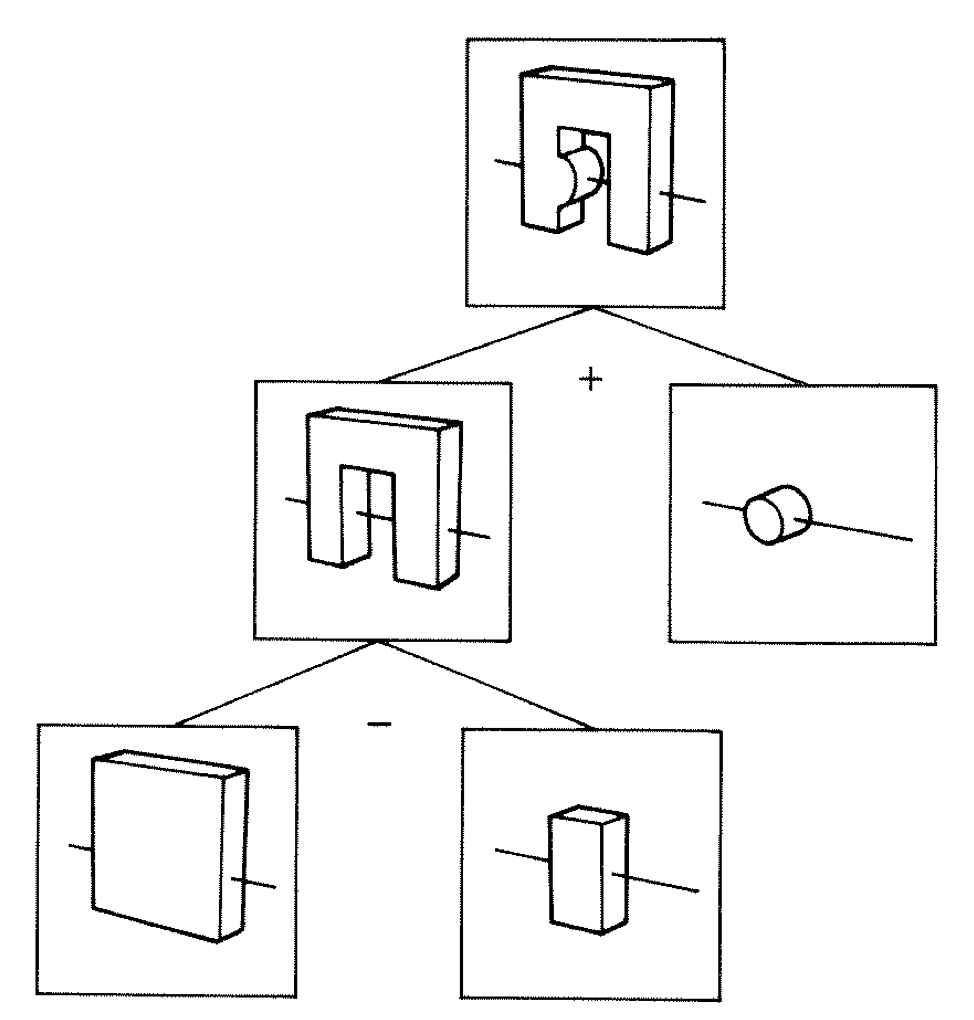
CSG expressions
- non-unique: A - B == A * !B
- represented by binary tree, primitives at leaves
3D Parametric Ray : ray(t) = r0 + t rDir
Ray Geometry Intersection
- primitive : find t roots of implicit eqn
- composite : pick primitive intersect, depending on CSG tree
How to pick exactly ?
CSG : Which primitive intersect to pick ?
Classical Roth diagram approach
- find all ray/primitive intersects
- recursively combine inside intervals using CSG operator
- works from leaves upwards
Computational requirements:
- find all intersects, store them, order them
- recursive traverse
BUT : High performance on GPU requires:
- massive parallelism -> more the merrier
- low register usage -> keep it simple
- small stack size -> avoid recursion
Classical approach not appropriate on GPU
CSG Complete Binary Tree Serialization -> simplifies GPU side
Geant4 solid -> CSG binary tree (leaf primitives, non-leaf operators, 4x4 transforms on any node)
Serialize to complete binary tree buffer:
- no need to deserialize, no child/parent pointers
- bit twiddling navigation avoids recursion
- simple approach profits from small size of binary trees
- BUT: very inefficient when unbalanced
Height 3 complete binary tree with level order indices:
depth elevation
1 0 3
10 11 1 2
100 101 110 111 2 1
1000 1001 1010 1011 1100 1101 1110 1111 3 0
postorder_next(i,elevation) = i & 1 ? i >> 1 : (i << elevation) + (1 << elevation) ; // from pattern of bits
Postorder tree traverse visits all nodes, starting from leftmost, such that children
are visited prior to their parents.
Evaluative CSG intersection Pseudocode : recursion emulated
fullTree = PACK( 1 << height, 1 >> 1 ) // leftmost, parent_of_root(=0)
tranche.push(fullTree, ray.tmin)
while (!tranche.empty) // stack of begin/end indices
{
begin, end, tmin <- tranche.pop ; node <- begin ;
while( node != end ) // over tranche of postorder traversal
{
elevation = height - TREE_DEPTH(node) ;
if(is_primitive(node)){ isect <- intersect_primitive(node, tmin) ; csg.push(isect) }
else{
i_left, i_right = csg.pop, csg.pop // csg stack of intersect normals, t
l_state = CLASSIFY(i_left, ray.direction, tmin)
r_state = CLASSIFY(i_right, ray.direction, tmin)
action = LUT(operator(node), leftIsCloser)(l_state, r_state)
if( action is ReturnLeft/Right) csg.push(i_left or i_right)
else if( action is LoopLeft/Right)
{
left = 2*node ; right = 2*node + 1 ;
endTranche = PACK( node, end );
leftTranche = PACK( left << (elevation-1), right << (elevation-1) )
rightTranche = PACK( right << (elevation-1), node )
loopTranche = action ? leftTranche : rightTranche
tranche.push(endTranche, tmin)
tranche.push(loopTranche, tminAdvanced ) // subtree re-traversal with changed tmin
break ; // to next tranche
}
}
node <- postorder_next(node, elevation) // bit twiddling postorder
}
}
isect = csg.pop(); // winning intersect
https://bitbucket.org/simoncblyth/opticks/src/tip/optixrap/cu/csg_intersect_boolean.h
CSG Deep Tree : Positivize tree using De Morgan's laws
1st step to allow balancing : Positivize : remove CSG difference di operators
... ...
un cy
un cy
un cy
un cy
un cy
di cy
cy cy
... ...
un cy
un cy
un cy
un cy
un cy
in cy
cy !cy
CSG Examples