Outline
- Context and Problem
- Jiangmen Underground Neutrino Observatory (JUNO)
- Optical Photon Simulation Problem...
- Tools to create Solution
- Optical Photon Simulation ≈ Ray Traced Image Rendering
- Rasterization and Ray tracing
- Turing Built for RTX
- BVH : Bounding Volume Hierarchy
- NVIDIA OptiX Ray Tracing Engine
- Opticks : The Solution
- Geant4 + Opticks Hybrid Workflow : External Optical Photon Simulation
- Opticks : Translates G4 Optical Physics to CUDA/OptiX
- Opticks : Translates G4 Geometry to GPU, Without Approximation
- CUDA/OptiX Intersection Functions for ~10 Primitives
- CUDA/OptiX Intersection Functions for Arbitrarily Complex CSG Shapes
- Validation and Performance
- Random Aligned Bi-Simulation -> Direct Array Comparison
- Perfomance Scanning from 1M to 400M Photons
- Overview + Links
Optical Photon Simulation ≈ Ray Traced Image Rendering
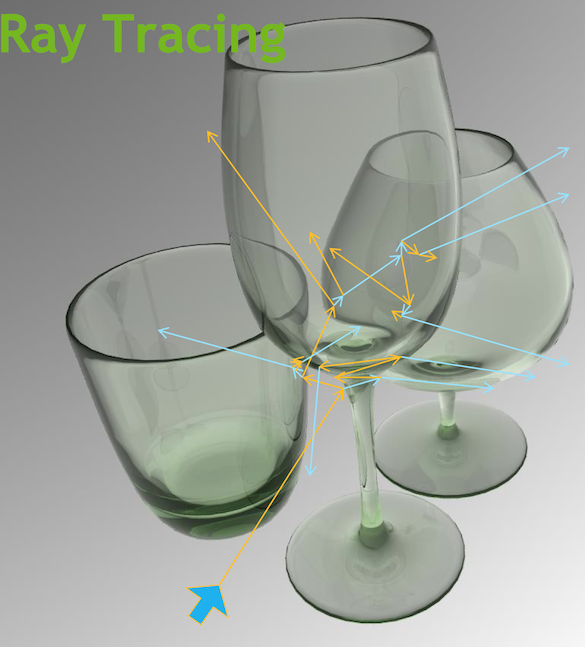
Much in common : geometry, light sources, optical physics
- simulation : photon parameters at PMT detectors
- rendering : pixel values at image plane
- both limited by ray geometry intersection, aka ray tracing
Many Applications of ray tracing :
- advertising, design, architecture, films, games,...
- -> huge efforts to improve hw+sw over 30 yrs
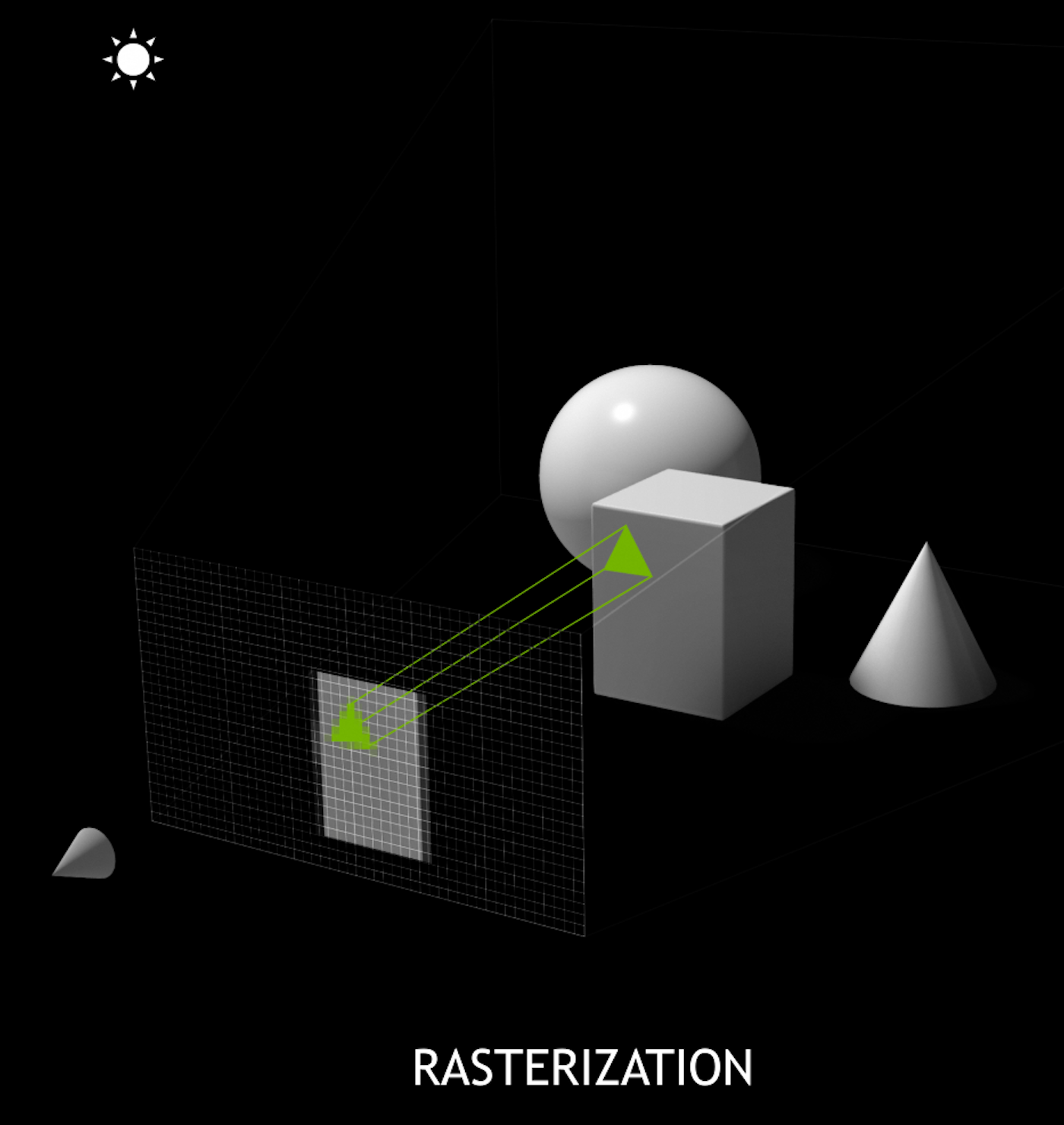
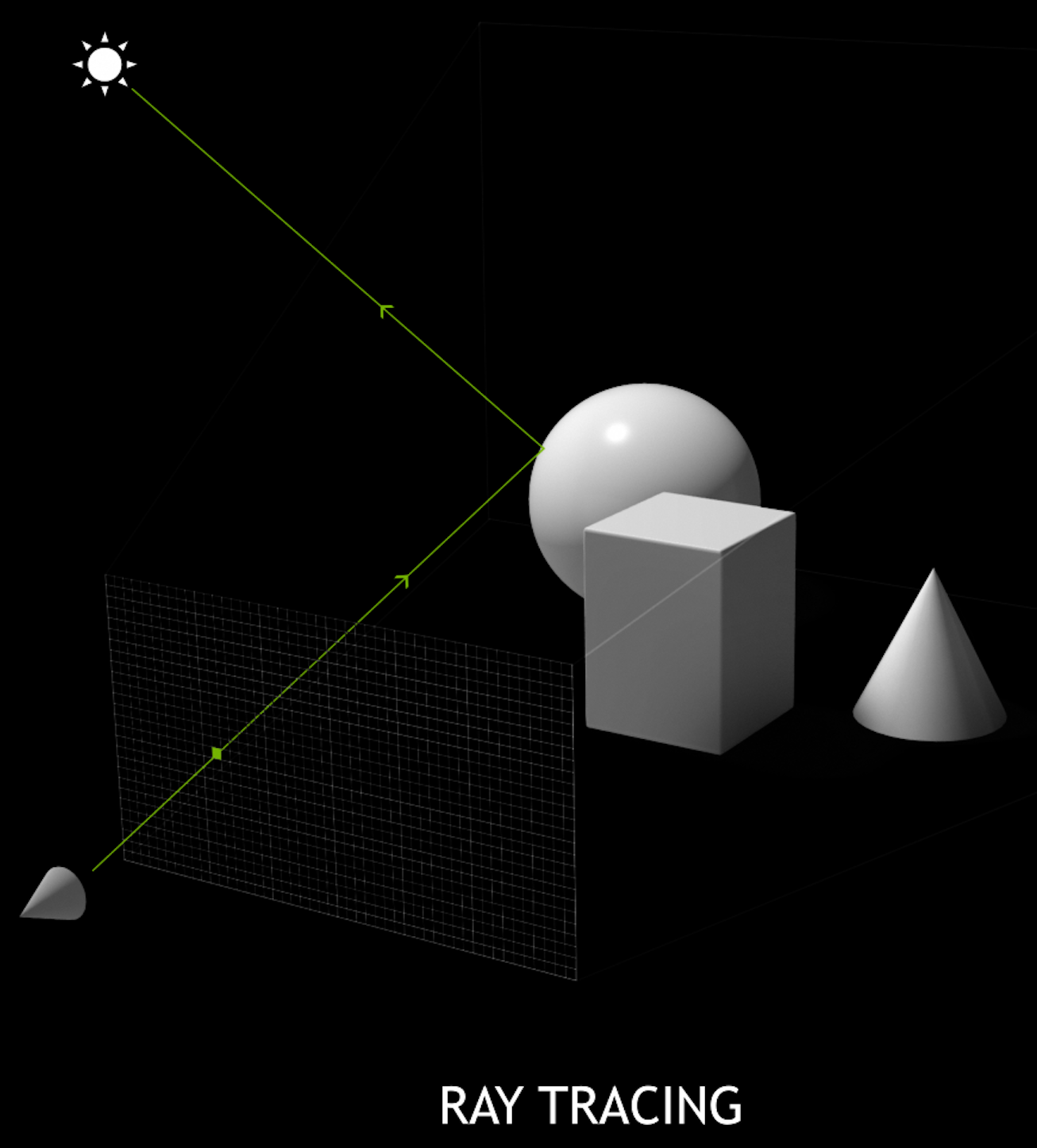
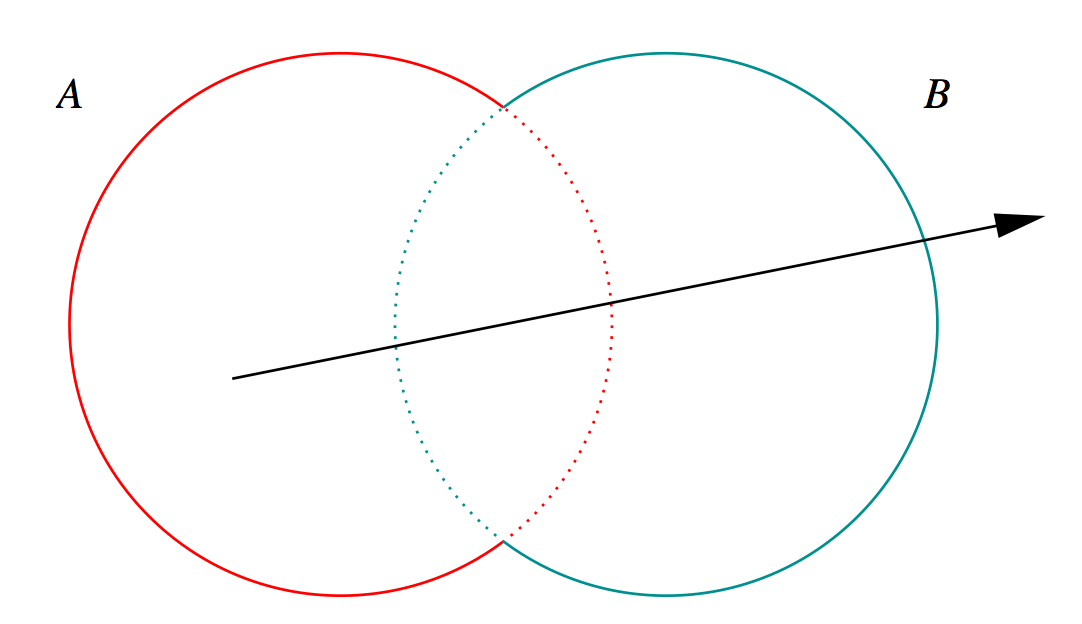
Ray-tracing vs Rasterization
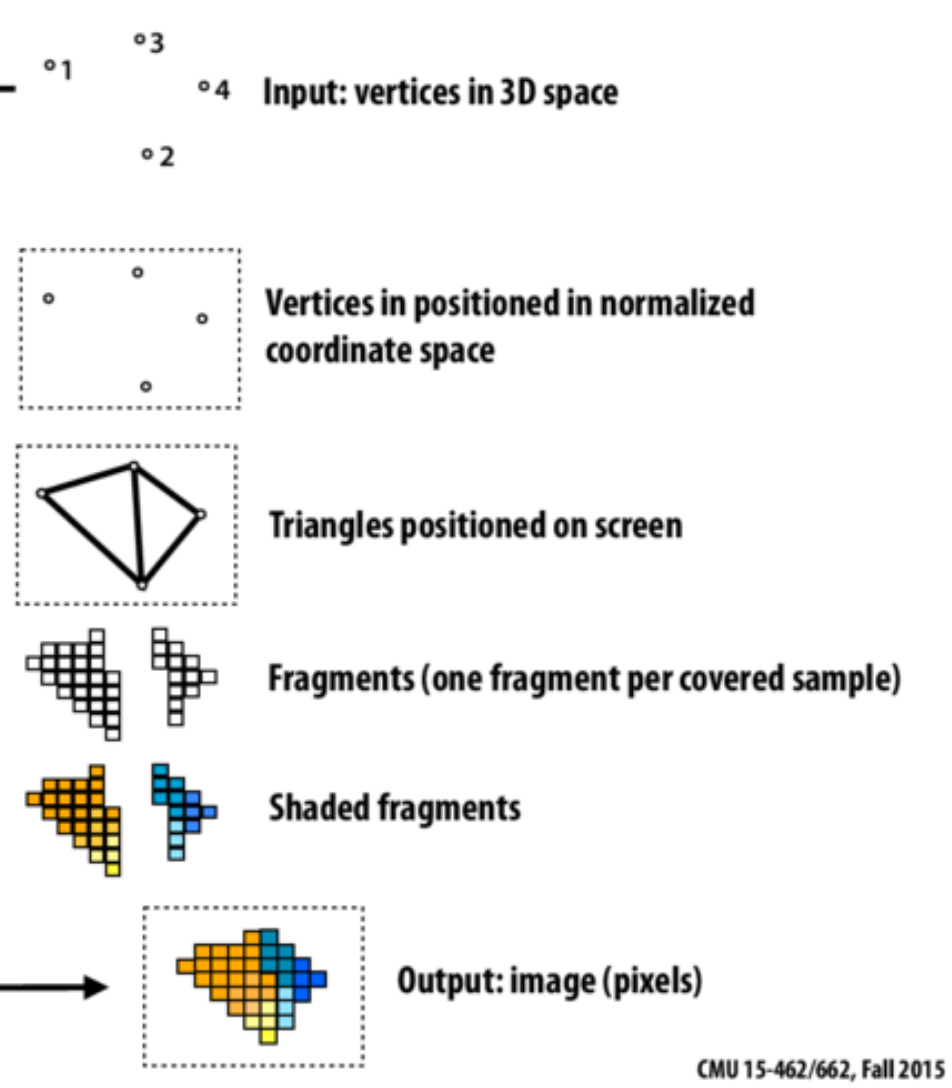
NVIDIA® OptiX™ Ray Tracing Engine -- http://developer.nvidia.com/optix
Analogous to OpenGL rasterization pipeline:
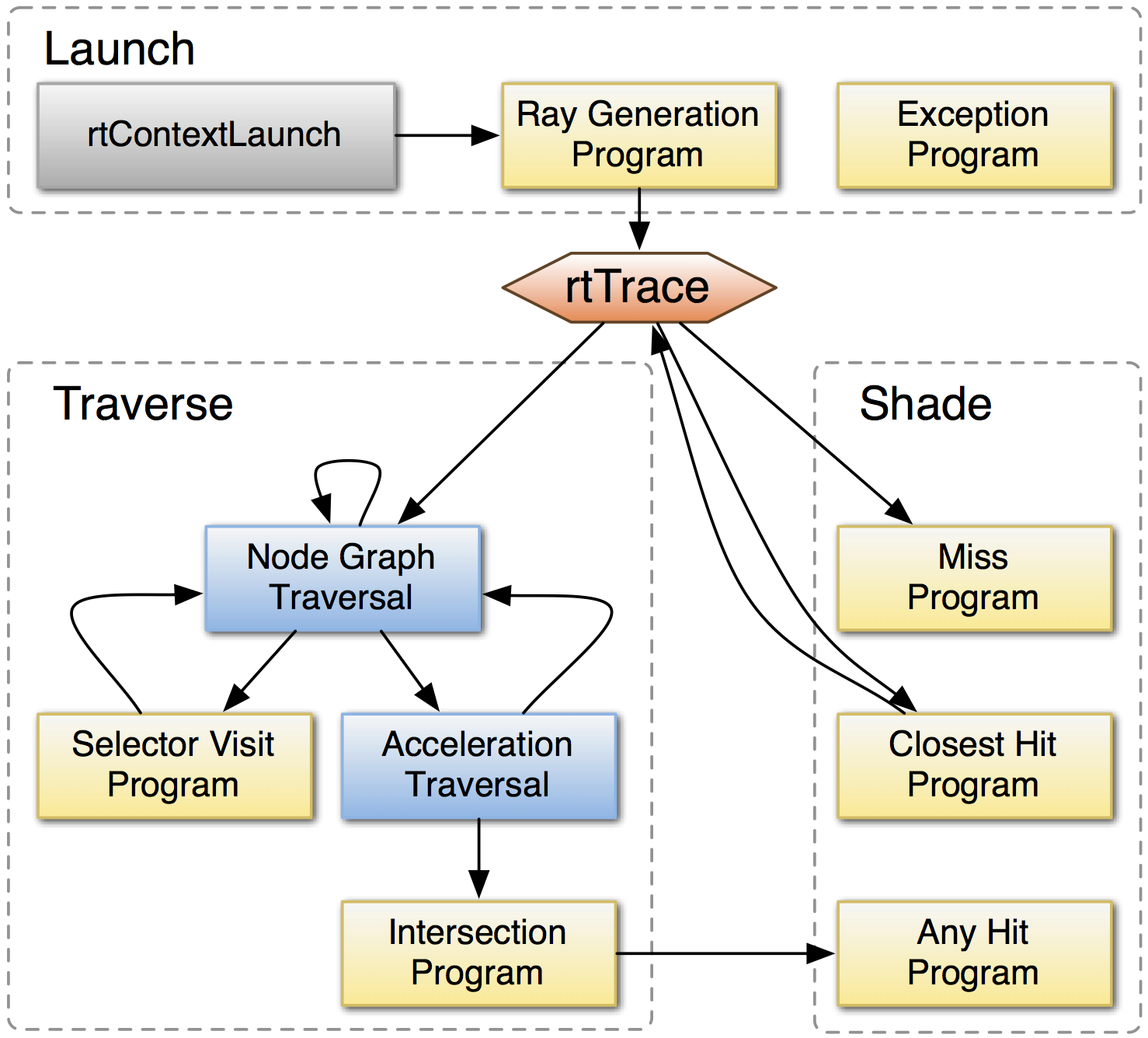
OptiX makes GPU ray tracing accessible
- accelerates ray-geometry intersections
- simple : single-ray programming model
- "...free to use within any application..."
- access RT Cores[1] with OptiX 6.0.0+ via RTX™ mode
NVIDIA expertise:
- ~linear scaling up to 4 GPUs
- acceleration structure creation + traversal (Blue)
- instanced sharing of geometry + acceleration structures
- compiler optimized for GPU ray tracing
Opticks provides (Yellow):
- ray generation program
- ray geometry intersection+bbox programs
[1] Turing RTX GPUs
Opticks : Translates G4 Optical Physics to CUDA/OptiX
- Seeded on GPU
- associate photons -> gensteps (via seed buffer)
- Generated on GPU, using genstep param:
- number of photons to generate
- start/end position of step
- Propagated on GPU
- Only photons hitting PMTs copied to CPU
Thrust: high level C++ access to CUDA
OptiX : single-ray programming model -> line-by-line translation
- CUDA Ports of Geant4 classes
- G4Cerenkov (only generation loop)
- G4Scintillation (only generation loop)
- G4OpAbsorption
- G4OpRayleigh
- G4OpBoundaryProcess (only a few surface types)
- Modify Cherenkov + Scintillation Processes
- collect genstep, copy to GPU for generation
- avoids copying millions of photons to GPU
- Scintillator Reemission
- fraction of bulk absorbed "reborn" within same thread
- wavelength generated by reemission texture lookup
- Opticks (OptiX/Thrust GPU interoperation)
- OptiX : upload gensteps
- Thrust : seeding, distribute genstep indices to photons
- OptiX : launch photon generation and propagation
- Thrust : pullback photons that hit PMTs
- Thrust : index photon step sequences (optional)
G4Solid -> CUDA Intersect Functions for ~10 Primitives
- 3D parametric ray : ray(x,y,z;t) = rayOrigin + t * rayDirection
- implicit equation of primitive : f(x,y,z) = 0
- -> polynomial in t , roots: t > t_min -> intersection positions + surface normals
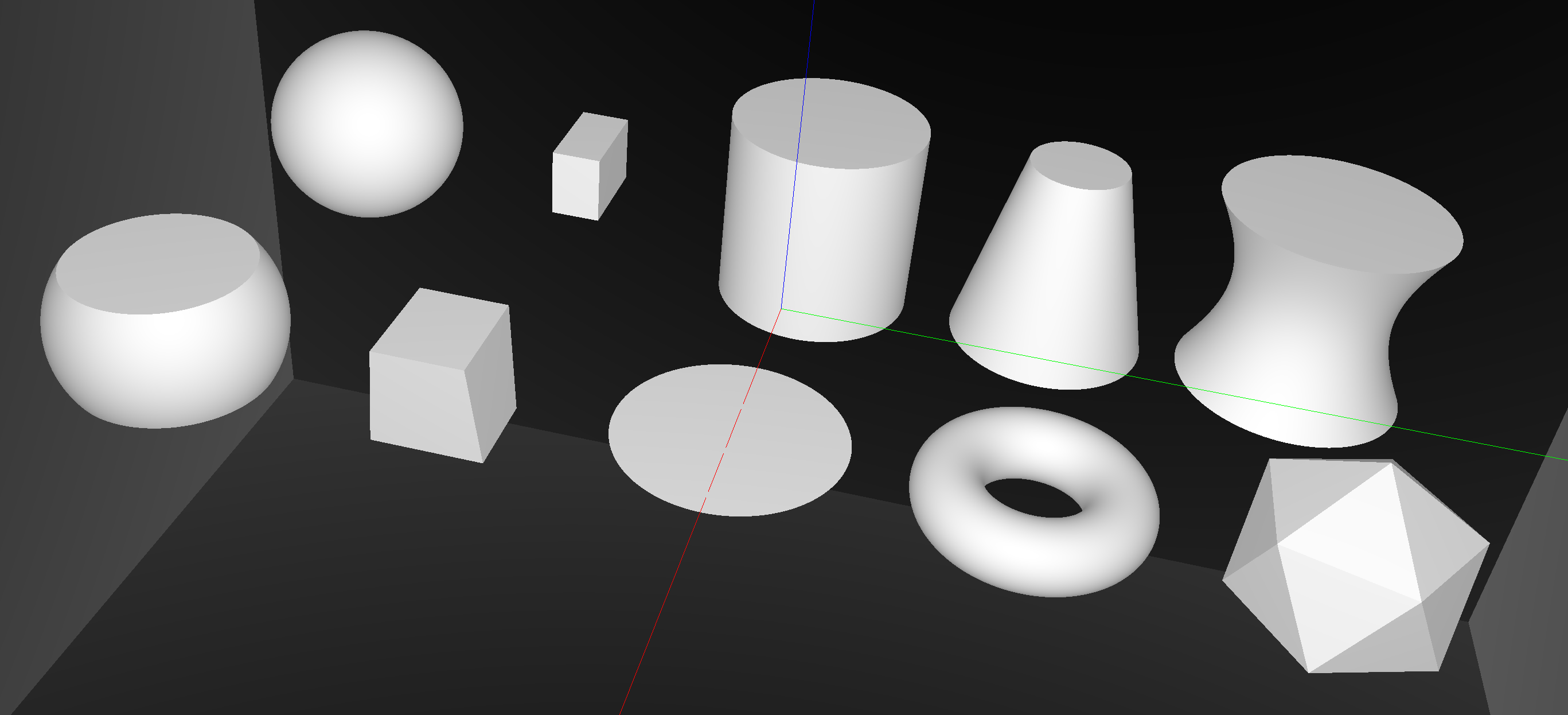
Sphere, Cylinder, Disc, Cone, Convex Polyhedron, Hyperboloid, Torus, ...
G4Boolean -> CUDA/OptiX Intersection Program Implementing CSG
dot(normal,rayDir) -> Enter/Exit
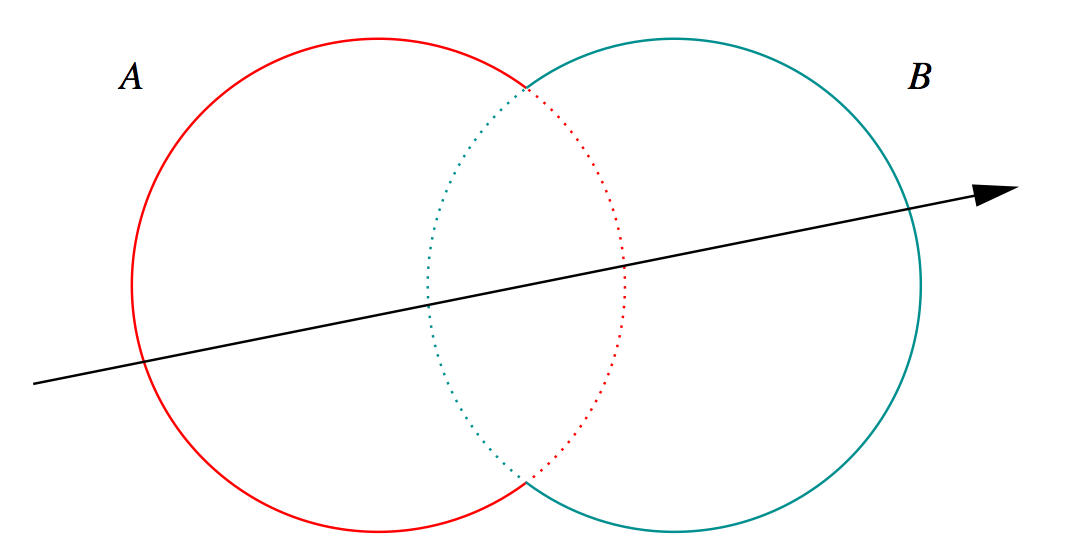
- A + B boundary not inside other
- A * B boundary inside other
Complete Binary Tree, pick between pairs of nearest intersects:
| UNION tA < tB | Enter B | Exit B | Miss B |
|---|---|---|---|
| Enter A | ReturnA | LoopA | ReturnA |
| Exit A | ReturnA | ReturnB | ReturnA |
| Miss A | ReturnB | ReturnB | ReturnMiss |
- Nearest hit intersect algorithm [1] avoids state
- sometimes Loop : advance t_min , re-intersect both
- classification shows if inside/outside
- Evaluative [2] implementation emulates recursion:
- recursion not allowed in OptiX intersect programs
- bit twiddle traversal of complete binary tree
- stacks of postorder slices and intersects
- Identical geometry to Geant4
- solving the same polynomials
- near perfect intersection match
- [1] Ray Tracing CSG Objects Using Single Hit Intersections, Andrew Kensler (2006)
- with corrections by author of XRT Raytracer http://xrt.wikidot.com/doc:csg
- [2] https://bitbucket.org/simoncblyth/opticks/src/tip/optixrap/cu/csg_intersect_boolean.h
- Similar to binary expression tree evaluation using postorder traverse.
Summary

Opticks : state-of-the-art GPU ray tracing applied to optical photon simulation and integrated with Geant4, giving a leap in performance that eliminates memory and time bottlenecks.
- Drastic speedup -> better detector understanding -> greater precision
- any simulation limited by optical photons can benefit
- more photon limited -> more overall speedup (99% -> 100x)
| https://bitbucket.org/simoncblyth/opticks | code repository |
| https://simoncblyth.bitbucket.io | presentations and videos |
| https://groups.io/g/opticks | forum/mailing list archive |
| email:opticks+subscribe@groups.io | subscribe to mailing list |
Amdahls "Law" : Expected Speedup Limited by Serial Processing
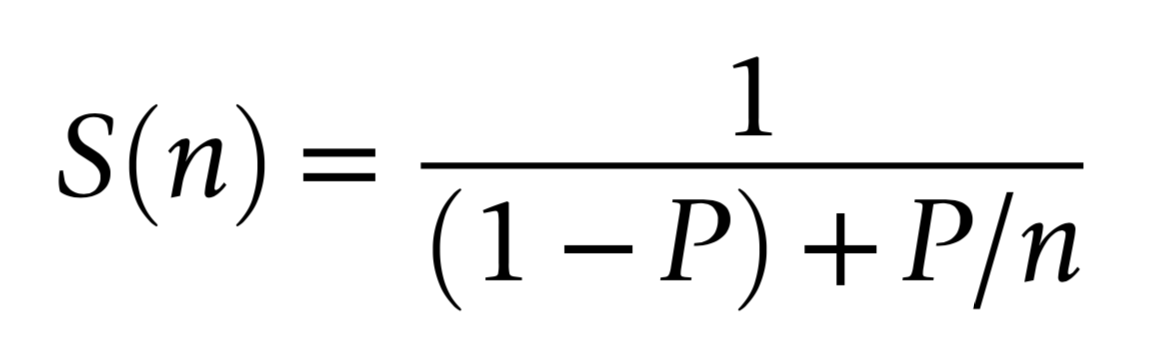
- P
- parallelizable proportion
- 1-P
- non-parallelizable portion
- n
- parallel speedup factor
optical photon simulation, P ~ 99% of CPU time
- -> potential overall speedup S(n) is 100x
- even with parallel speedup factor >> 1000x
Must consider processing "big picture"
- remove bottlenecks one by one
- re-evaluate "big picture" after each
Understanding GPU Graphical Origins -> Effective GPU Computation
GPUs evolved to rasterize 3D graphics at 30/60 fps
- 30/60 "launches" per second, each handling millions of items
- literally billions of small "shader" programs run per second
Simple Array Data Structures (N-million,4)
- millions of vertices, millions of triangles
- vertex: (x y z w)
- colors: (r g b a)
Constant "Uniform" 4x4 matrices : scaling+rotation+translation
- 4-component homogeneous coordinates -> easy projection
Graphical Experience Informs Fast Computation on GPUs
- array shapes similar to graphics ones are faster
- "float4" 4*float(32bit) = 128 bit memory reads are favored
- Opticks photons use "float4x4" just like 4x4 matrices
- GPU Launch frequency < ~30/60 per second
- avoid copy+launch overheads becoming significant
- ideally : handle millions of items in each launch
CPU Optimizes Latency, GPU Optimizes Throughput
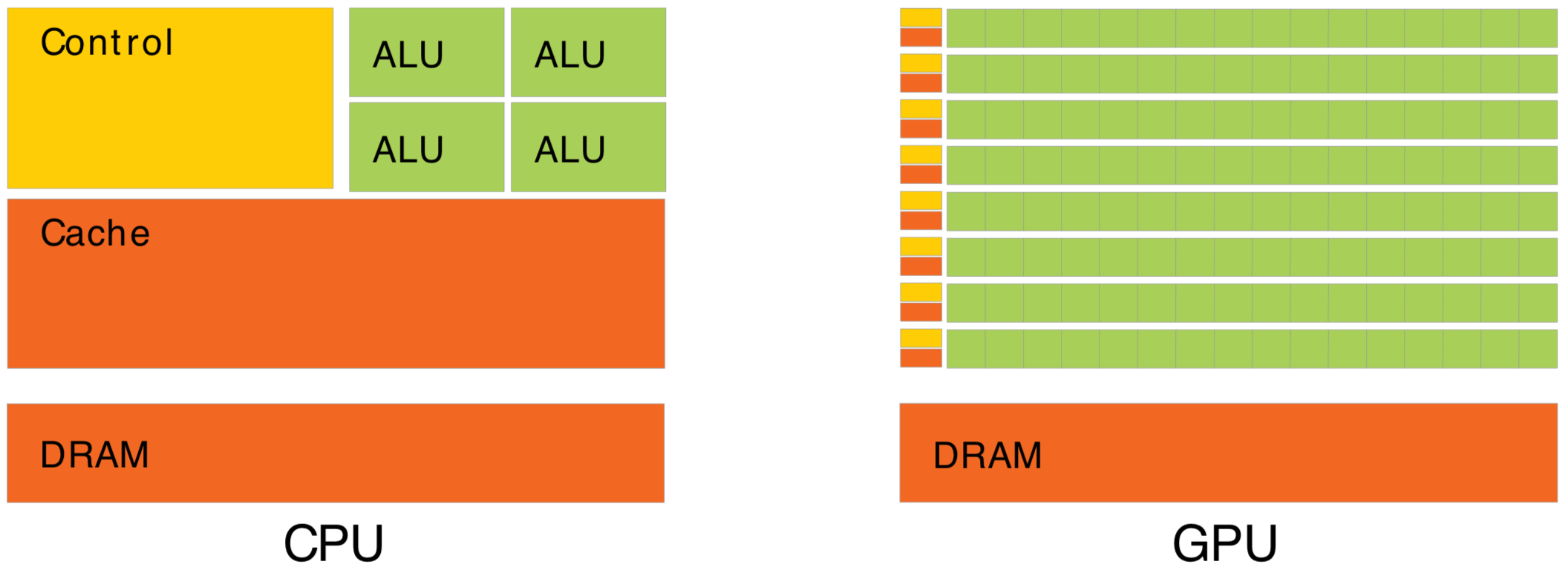
Waiting for memory read/write, is major source of latency...
- CPU : latency-oriented : Minimize time to complete single task : avoid latency with caching
- complex : caching system, branch prediction, speculative execution, ...
- GPU : throughput-oriented : Maximize total work per unit time : hide latency with parallelism
- many simple processing cores, hardware multithreading, SIMD (single instruction multiple data)
- simpler : lots of compute (ALU), at expense of cache+control
- can tolerate latency, by assuming abundant other tasks to resume : design assumes parallel workload
- Totally different processor architecture -> Total reorganization of data and computation
- major speedups typically require total rethink of data structures and computation
How to Make Effective Use of GPUs ? Parallel / Simple / Uncoupled
- Abundant parallelism
- many thousands of tasks (ideally millions)
- Low register usage : otherwise limits concurrent threads
- simple kernels, avoid branching
- Little/No Synchronization
- avoid waiting, avoid complex code/debugging
- Minimize CPU<->GPU copies
- reuse GPU buffers across multiple CUDA launches
How Many Threads to Launch ?
- can (and should) launch many millions of threads
- largest Opticks launch : 400M threads, at VRAM limit
- maximum thread launch size : so large its irrelevant
- maximum threads inflight : #SM*2048 = 80*2048 ~ 160k
- best latency hiding when launch > ~10x this ~ 1M
Understanding Throughput-oriented Architectures https://cacm.acm.org/magazines/2010/11/100622-understanding-throughput-oriented-architectures/fulltext
NVIDIA Titan V: 80 SM, 5120 CUDA cores
Survey of High Level General Purpose CUDA Packages
- https://cupy.chainer.org/
- NumPy API accelerated by CUDA stack
- plus some of SciPy API
- develop processing with NumPy on CPU
- switch numpy->cupy to test on GPU
- great for prototyping
"Production" CuPy ? Depends on requirements:
- integrations (eg Geant4, OpenGL, ...)
- control + performance
- Learn CUDA basics (kernels, thread+memory hierarchy, ...)
- BUT: base development on higher level libs -> faster start
C++ Based Interfaces to CUDA
- Thrust : https://developer.nvidia.com/Thrust
- C++ interface to CUDA performance
- high-level abstraction : reduce, scan, sort
- CUB : http://nvlabs.github.io/cub/
- CUDA C++ specific, GPU less hidden
- MGPU : https://github.com/moderngpu/moderngpu
- teaching tool : examples of CUDA algorithms
Mature NVIDIA Basis Libraries
- cuRAND, cuFFT, cuBLAS, cuSOLVER, cuTENSOR, ...
- https://developer.nvidia.com/gpu-accelerated-libraries
RAPIDS : New NVIDIA "Suite" of open source data science libs
- GPU-accelerated open source data science suite
- "... end-to-end data science workflows..." http://rapids.ai/
- cuDF : GPU dataframe library, Pandas-on-GPU
NumPy : Foundation of Python Data Ecosystem
https://bitbucket.org/simoncblyth/intro_to_numpy
Very terse, array-oriented (no-loop) python interface to C performance
- C speed, python brevity + ease
- array-oriented
- vectorized : no python loops
- efficiently work with large arrays
- Recommended paper:
- The NumPy array: a structure for efficient numerical computation https://hal.inria.fr/inria-00564007
https://docs.scipy.org/doc/numpy/user/quickstart.html
http://www.scipy-lectures.org/intro/index.html
https://github.com/donnemartin/data-science-ipython-notebooks
Applying CUDA Thrust -> Translate Task into Processing "Primitives"
Benefit from highly optimized GPU implementations
- number of unique values
- -> thrust::inner_product with sorted self shifted by one
- find all unique keys with their counts
- -> thrust::reduce_by_key
- sorted counts for each value
- -> thrust::sort_by_key
Thrust Hides GPU Details
- helpful when starting, can reach thru to lower level
- easy interoperation with
- CUDA, OpenGL, NVIDIA OptiX
Thrust : High level C++ interface to CUDA
thrust::inner_product
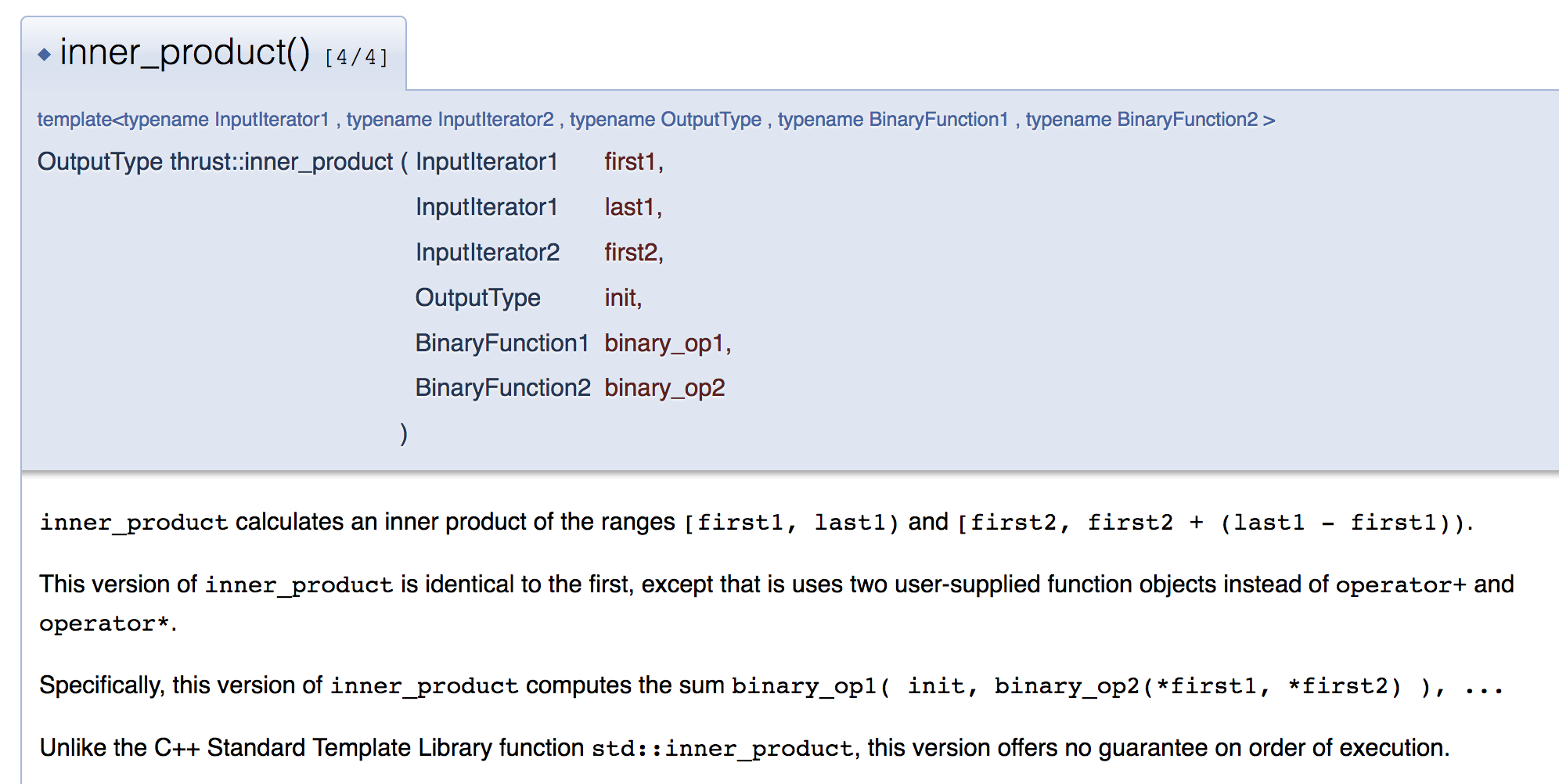
An example of Thrust documentation
thrust::reduce_by_key
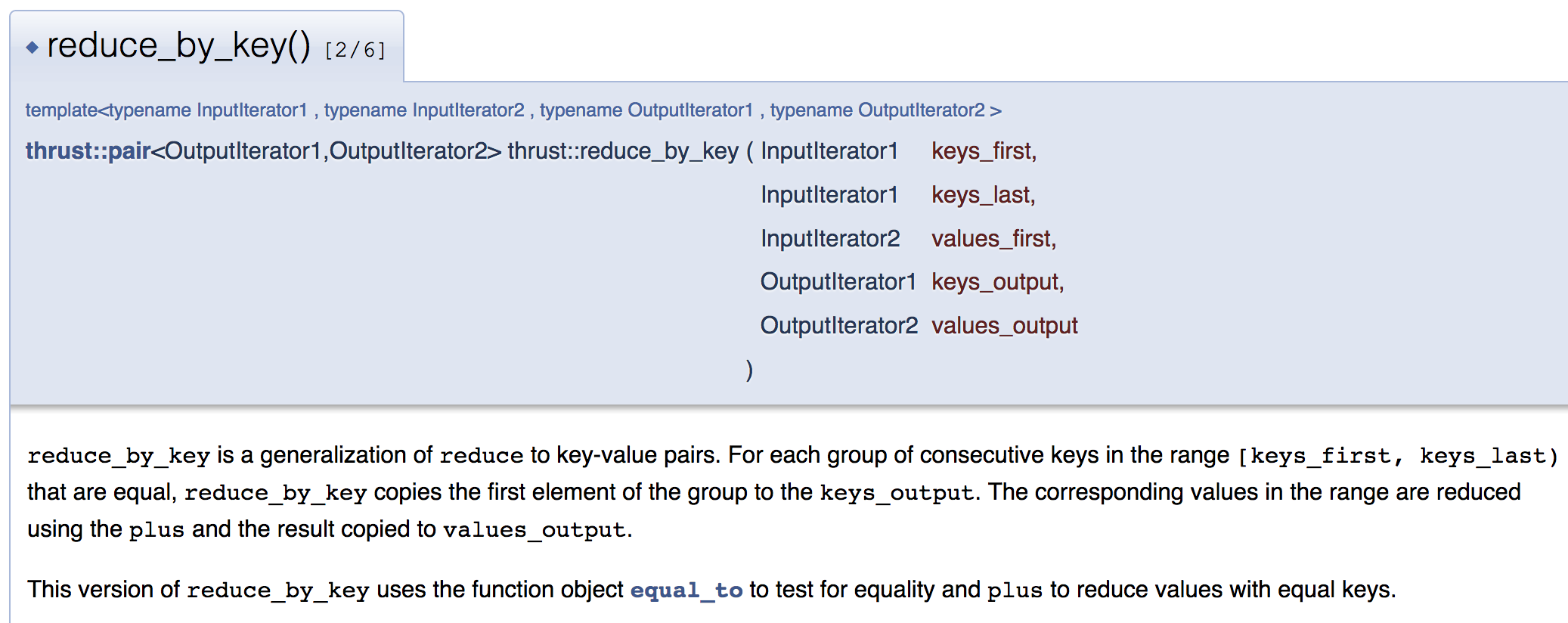
Best way to learn Thrust API is exercise it by writing small tests
- https://bitbucket.org/simoncblyth/opticks/src/default/thrustrap/tests/
- Thrust implemented with template metaprogramming
- -> quite slow compilation
- thousands of lines of compilation errors when mis-using API